Nature does not stop us marveling at its splendor be it at macro level or micro scale. There are limitless options to investigate and get inspired. Biomimicry is one such field in robotics, which is completely drenched with nature’s splash. Researchers do not leave any stone unturned when dealing with robos inspired from nature, lately a concept is put forward by experts at the University of Twente, Netherlands. They have taken inspiration from nature’s locomotion at microscale and have combined the process of two micro-scale entities like magnetotactic bacteria and sperm cells and developed the MagnetoSperm microrobots.
Dynamics of the Microrobots
Researchers at the University of Twente in collaboration with German University, Egypt have designed microrobots that are based on sperms, the male reproductive cells. Maneuvering of these nanobots is done with the help of weak magnetic force that is provided from the outside.
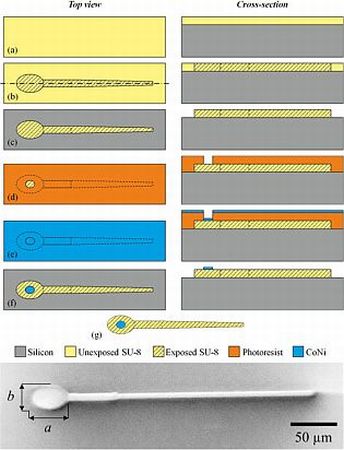
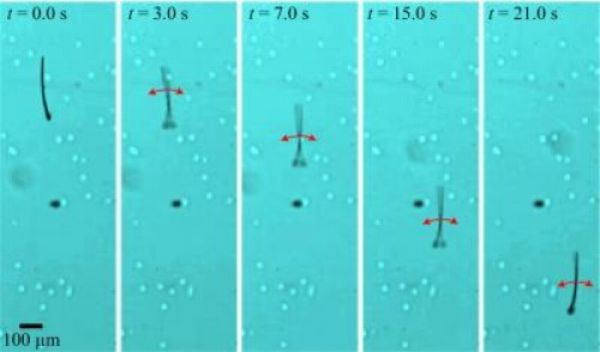
These microrobots are 322 micron in length. Its head is covered with thick layer of cobalt-nickel mixture while the tail region is uncoated. Upon exposure of slight magnetic flux, nearly 5 millitesla, the flagellum undergoes oscillation hence it propels forward. The movement occurs because of the magnetic torque being felt on the head region.
In order to aim at a particular direction, the bot can be moved by controlling the magnetic field lines.
Controlling the Microcosmos
Researchers envision that using the micro-bots for complex micromanipulation in industrial, navigation systems and medical field like in vitro fertilization, doing away with clogging within arteries and for targeted therapy tasks like facilitating drug delivery.
With the advancement in technology and the emergence of 3D techniques, things might go slightly tough at assembling objects at nano scales, it is here the MagnetoSperm microrobots can intervene can bring about the desired result. The microrobots would maneuver the objects at micro scale under the control of an external magnetic field.
Future for these MagnetoSperm microrobots looks promising and might prove boon for the related future technologies that we would be witnessing soon.
Journal Reference:
Islam S. M. Khalil
Herman C. Dijkslag
Leon Abelmann and
Sarthak Misra
MagnetoSperm: A Microrobot that Navigates using Weak Magnetic Fields.
Applied Physics Letters, June 2, 2014 DOI: 10.1063/1.4880035