Nature has always inspired philosophers, scientists, and researchers alike. When it comes to solve human problems or create innovative products and technologies, studying nature’s designs and processes lead to more sustainable and efficient solutions.
Afterall, nature has had millions of years to develop solutions to problems. These solutions have been honed through the process of natural selection.
Learning and getting inspired from nature’s solutions, is called biomimicry. Designers, engineers, and scientists are inspired from nature to create more sustainable and efficient products and systems.
For example, studying the way that the structure of a bird’s wing allows it to fly can inspire the development of more efficient aircraft designs.
Similarly, studying how plants collect and use energy from the sun can inform the development of more efficient solar panels.
Proprioception abilities and tail mechanics in robots
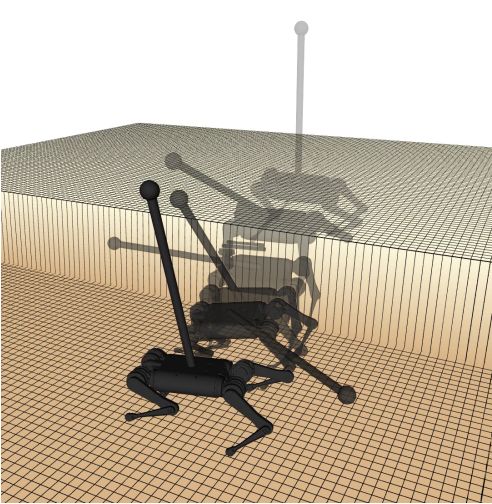
Recently, gait of animals has inspired researchers at Carnegie Mellon University (CMU)’s Robomechanics Lab to replicate similar proprioception abilities and tail mechanics of animals to improve the mobility of legged robots on challenging terrains.
Researchers have tried to replicate animals walk. Since, they tread along their own footprints to maintain stability on different terrains.
Sense that allows for perception of position, movement, and orientation in space is called proprioception. It is the result of sensory receptors located in the muscles, tendons, and joints, which send signals to the brain about the position and movement of the body.
Proprioception can overlay computer vision systems limitations
Researchers suggest the robots can be fed with similar idea of proprioception. With this information, the bots can overcome some of the limitations of computer vision systems, which can be adversely affected by various factors like:
- sensor noise
- hindrances
- poor lighting conditions and
- light reflections on nearby objects
Sensors for proprioception in robots
Animals and humans are naturally equipped with proprioception. While robots are accessorized with external sensors like cameras and lidar technology for navigation.
In the study, researchers devised an alternative approach. They made use of internal sensors like motors, encoders, and inertial measurement devices. And integrated those within the robot to gather data and improve its mobility in challenging environments.
The sensors integrated within the robot assisted the machine in detecting the slips and falls. The inbuilt sensors also adjusted its movements to avoid tipping over.
This system is more robust to environmental noise, such as obstacles, reflections, or lighting conditions, which can often interfere with external sensor systems.
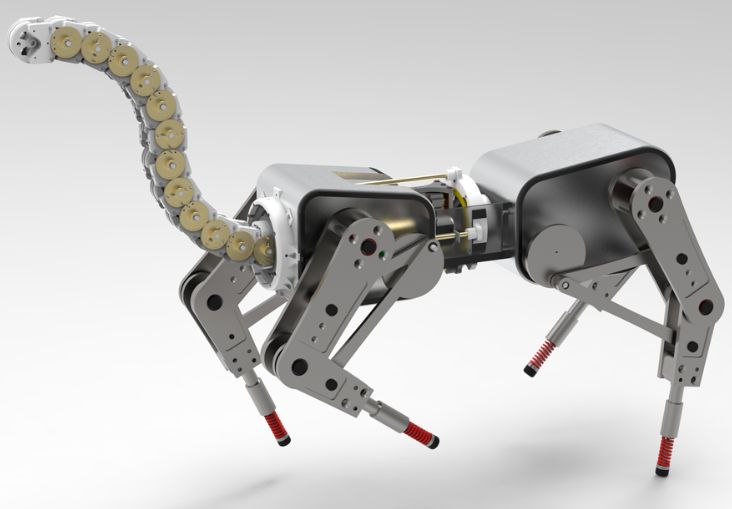
Artificial tail to a legged robot
Many animals, such as cats or cheetahs, use their tails to maintain balance and adjust their movements when navigating rough or uneven terrain. In the similar manner, the team also added an artificial tail to a legged robot and integrated it into the control system.
With this “new tail”, the bot can more effectively navigate in challenging environments and maximize its efficiency, added Yanhao Yang, one of the researchers who carried out the study.
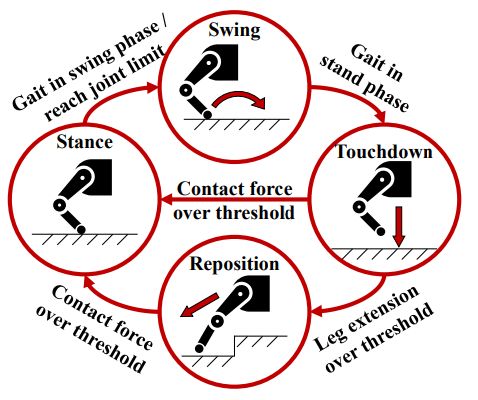
Yang and his colleagues also developed a control system that allows a legged robot’s artificial tail to work in coordination with its legs.
This will enable the robot to adapt to changes in terrain and maintain balance even when one or more legs are lifted off the ground.
Takeaway
The study opens new possibilities revolutionize the capabilities of legged robots. Additionally, it has significant implications for the field of robotics, such as:
- search and rescue,
- exploration, and
- military operations
Not to miss, the team’s efforts demonstrate the value of biomimicry in robotics, as taking inspiration from nature can lead to innovative and effective solutions to complex problems.
More information: Yanhao Yang et al, Proprioception and Tail Control Enable Extreme Terrain Traversal by Quadruped Robots, arXiv (2023). DOI: 10.48550/arxiv.2303.04781


