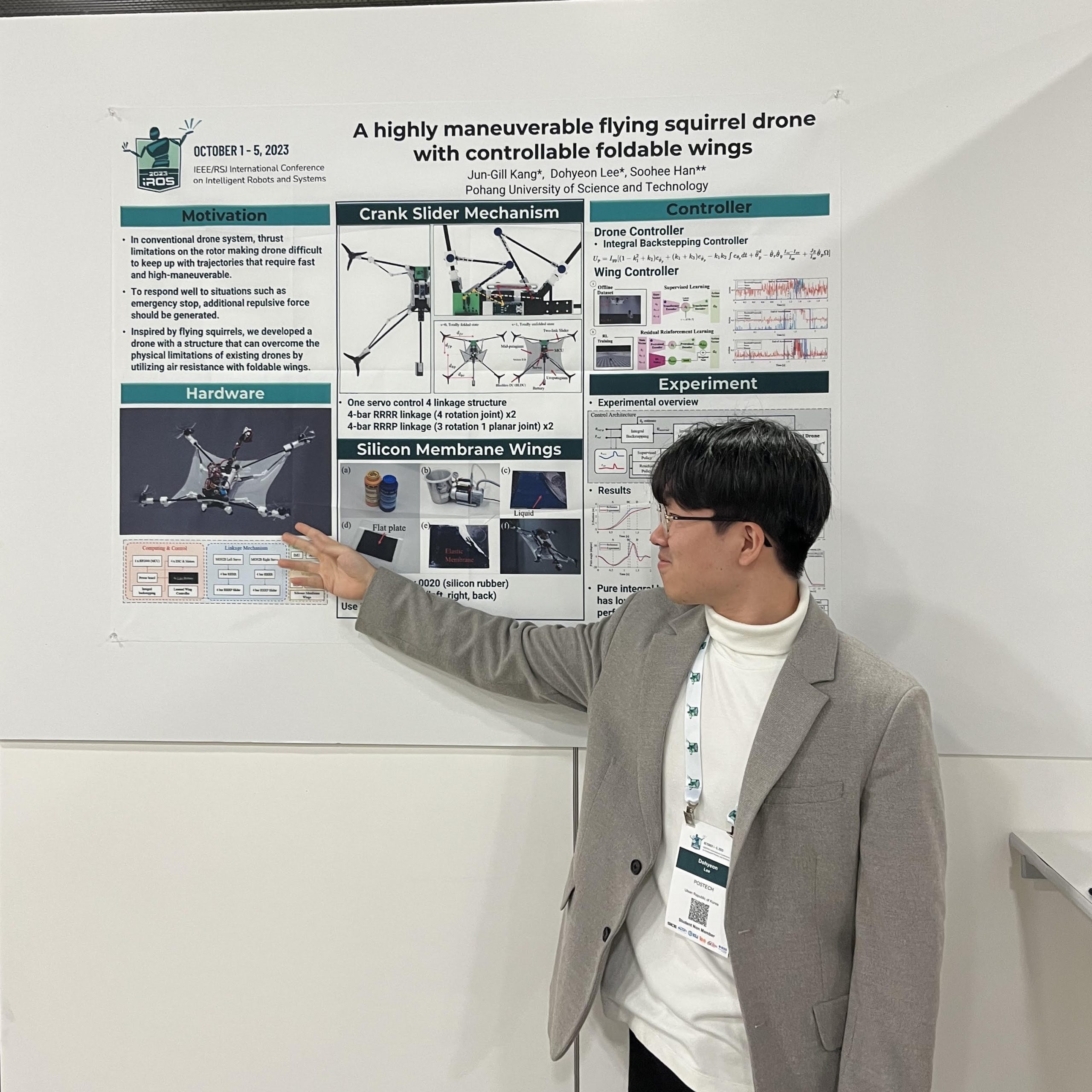
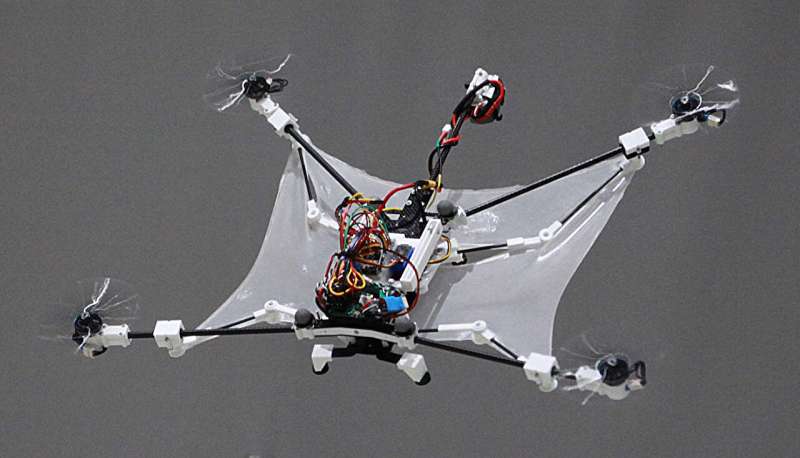
Last week, I came across something that genuinely blew my mind – a flying squirrel-inspired drone with foldable wings. Yep, a drone that mimics how a squirrel glides through the air. It was one of those rare “wait, what?” moments that made me want to dig deeper. So, I reached out to the team behind it. Dohyeon Lee, one of the researchers on the project, said yes to an email interview.
Dohyeon’s not a typical lab-coated roboticist. He’s currently an undergrad at POSTECH (Pohang University of Science and Technology) in South Korea. Right now, he’s actually serving in the military, doing his mandatory service. But once that’s done, he’s aiming for grad school in robotics. And honestly, after hearing about what he’s already working on, I’m not surprised.
He told me his interest in robotics started way before the fancy university labs and neural networks. “I just liked making things move,” he said. That simple joy of building stuff, especially things that move, eventually grew into something bigger. He got curious about how robots could not just move, but react, adapt, and think a bit like living creatures. That’s what pulled him toward biomimicry, building machines that learn from nature.
What struck me most wasn’t just the tech, it was how grounded his approach is. He’s not chasing robots for the sake of shiny machines. He’s in it because he’s genuinely fascinated by how living things work, and how we can learn from them to build better tools. He’s also refreshingly honest about the challenges. “Balancing the mechanical design with the AI system was tough”, he said. “There were days when we’d change one thing and five other things would break.”
And yet, he keeps going. Driven by that original spark from his childhood. He’s still building, still testing, still curious. Talking to him reminded me that behind every cool robot or clever design, there’s usually someone who just never stopped asking, “What if?”
One thing I really admire in people is that deep curiosity, the genuine desire to understand how something works. It’s such a powerful trait, and I always find myself drawn to those kinds of minds. I try my best to reach out and bring those inspiring people in for an interview. Honestly, getting the chance to talk to my intellectual heroes, never gets old. It’s exciting, humbling, and just really fun. So, here I am with another such inspiring stories of one such robotics scientist, scroll down and see for yourself:
What initially sparked your interest in Robotics, and what motivated you to pursue it as a career?
There doesn’t seem to be a specific trigger for an interest in robotics. Since childhood, creating things or making them move has been enjoyable, and in chasing that joy, an interest in robots naturally developed.
After entering university, I was introduced to traditional ways of controlling robots, as well as methods of combining AI to make robots move. I realized that there are so many areas in which robots can still develop.
At the same time, I came to understand how challenging it is for robots to interact with the physical world. This made me think about how animals and humans perceive, reason, and act in order to engage with their environment, and inspired a desire to enable robots to do the same.
I’m particularly interested in creating natural robotic movements and the decision-making processes behind them, and I plan to pursue research in this area.
The integration of a physics-assisted recurrent neural network (paRNN) to model the complex aerodynamics of foldable wings is intriguing. What were the primary challenges in developing and training this neural network, and how did it improve the drone’s performance? Ref: A highly maneuverable flying squirrel drone with agility-improving foldable wings
The silicone wing membrane we used exhibits aerodynamics that are difficult to model mathematically, and these aerodynamic properties continuously change depending on the drone’s attitude, velocity, and the history of such information. To address this, we flew the drone with its wings deployed to collect data and trained a neural network to model the aerodynamics.
The main challenge was that a large portion of the collected data represented scenarios where the aerodynamic drag of the membrane hindered the drone’s motion. To collect data across a wide range of speeds, we naturally had to include more instances where the drone was accelerating in the direction of motion(cases in which drag acts as a resistance) than instances where the drone was decelerating or changing direction, where drag could assist movement.
Since the model needed to learn from both types of scenarios – where drag helps and where it hinders -this imbalance in the dataset made training difficult. Moreover, all algorithms had to be implemented on an MCU rather than a computer, which imposed an additional constraint: the neural network had to remain lightweight.
To overcome these issues, we designed a physics-assisted recurrent neural network (paRNN), which allowed us to achieve the desired performance even with an imbalanced and limited dataset.
In both simulations and real-world experiments, drones using the aerodynamics modeled by paRNN outperformed those using conventional flat-wing dynamics.
Considering the drone’s improved agility and tracking performance, what potential real-world applications do you envision for this technology, especially in environments where traditional drones might struggle?
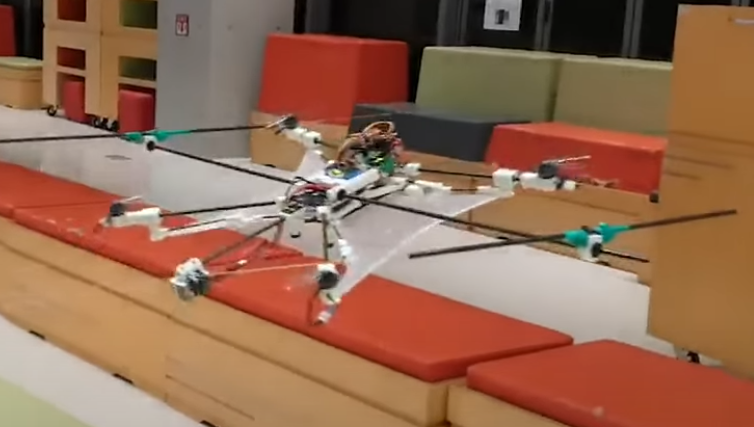
In environments with many obstacles, such as forests or urban areas where unexpected obstacles can suddenly appear, drones must fly at low speeds to avoid collisions. Flying at high speed requires significant energy to stop or change direction upon detecting an obstacle, and even then, avoiding a collision may not be possible.
In contrast, a flying squirrel-inspired drone can fly faster in the same conditions and avoid obstacles more easily with less energy.
How do you see biomimicry influencing the future of drone and robotics design, especially as technology continues to evolve and we look to nature for more innovative solutions to enhance performance and efficiency?
I believe that the forms and movements of animals are the result of a kind of large-scale learning process—namely, evolution through natural selection. Biomimicry inevitably plays a role in shaping the form of robots, and I think there is much more we can learn from animals, not only in terms of their physical structures but also in how they perceive and interact with their environment and how they process information.
As robotics continues to evolve, what do you believe is the most exciting frontier in robot development, whether it’s in terms of human-robot collaboration, autonomous decision-making, or new materials, and how close are we to seeing these innovations in real-world applications?
My main interests lie in human-robot collaboration, physical interaction between robots and the real world, and decision-making that takes such interactions into account.
I believe that high-level decision-making has seen considerable progress, thanks in part to advancements in fields such as natural language processing (NLP). However, low-level decision-making and the actual execution of physical movement pose a different kind of challenge, and I believe there is still much room for improvement in these areas.
What are your other interests besides robotics … reading, painting, gardening, skiing maybe?
I enjoy drawing on my pad when I’m bored, and I like skiing so much that I even started to enjoy winter because of it. Though I’m not very good at it.
Someone comes up to you and says, “I wanna be just like you. I want to be a “Robotics Scientist”, what advice would you give?
As an undergraduate with much still to learn, I’m not sure if I’m in a position to give advice. However, if I were to meet someone like that, I would tell them to never lose their passion for exploring robotics and to believe in themselves as they move forward.
Quick bits:
- What is your favorite movie quote?
It’s a mistake to think that happiness is the goal – Hector and the Search for Happiness
- If you were a superhero what would your powers be?
Probability manipulation ability
- Your favorite scientific innovation of the 21st century?
Development of Artificial Intelligence
(Wow! Thank you, Dohyeon Lee, for an incredibly inspiring conversation! Your work is a true source of inspiration. We eagerly anticipate our next visit to witness more of your innovative research. Until then, we extend our best wishes for your continued success in all your future endeavors.)