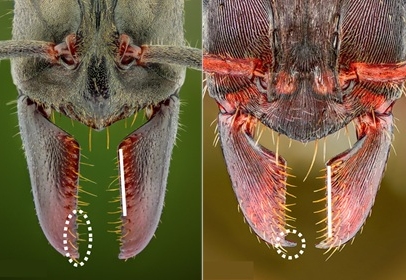
I’m not really into top-down approaches. I believe that in most effective systems, decisions happen at the individual level. For instance, take the case of ants or bees, while there’s structure, there isn’t constant centralized control. Individuals act based on local information, and coordination emerges naturally without waiting for hierarchical alignment.
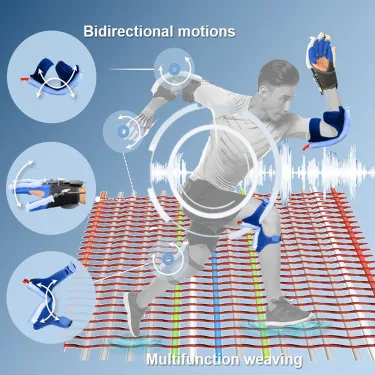
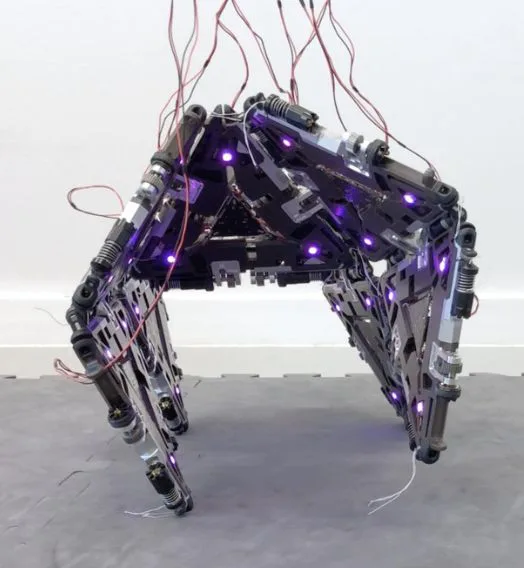
Read MoreAdaptive Architecture Powered by Mini Robots That Can Bloom