
Dr. Song Chaoyang is an Assistant Professor, Southern University of Science and Technology (SUSTech) China. His Bionic Design + Learning Lab conducts research in Bionic Design, Robot Learning and Design Science. His team’s vision is to create advanced robotic systems that are sustainable and intelligent.
After completing his undergraduate degree at Tongji University, Shanghai, China in 2009, Dr. Song earned his Ph.D. degree at the Robotics Research Center at Nanyang Technological University, Singapore in 2014. Before joining SUSTech, Dr. Song was appointed as a Lecturer (Assistant Professor) in the Department of Mechanical Engineering at Monash University.
I have been following his research and contacted him for an interview to which he agreed even during his hectic hours of work. So, without much ado, please find Dr Song Chaoyang himself answering questions on bionics research and of course his life:
What attracted you into bionics design and what immediate developments do we expect in the field?
The design has always been the core interest of my research theme. I refer to “design” as a human process of making things using scientific (measurable results with a repeatable process under theoretical assumption), engineering (tangible implementation of scientific methods towards useful systems), or creative methods (any interesting idea to solve an interesting problem).
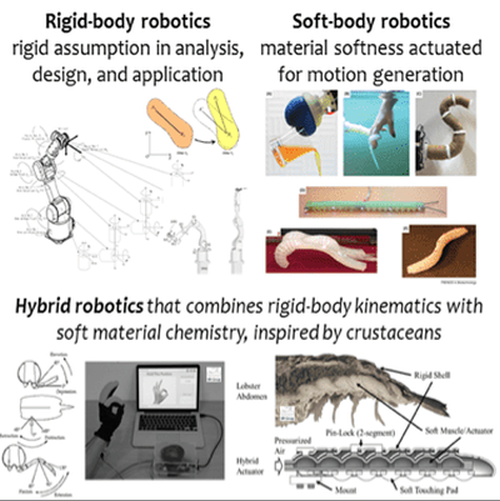
The “bionic” component of my design research mainly refers to a biologically inspired system that gives “rigid” machines a “soft” touch, where live systems provide a vibrant source of inspiration for new ideas when you want to solve some problems.
For example, we are very interested in lobsters, or crustaceans in general. They are similar to humans but with bone-like rigid structures outside of soft muscles, capable of walking on challenging terrains, handling objects in an extreme environment, providing agile and unique locomotion both on-land and underwater, or even on trees.
After my doctoral research on rigid mechanisms, I became attracted to bionic-inspirations from the crustaceans, which provide soft actuation without losing the kinematic rigidity while maintaining life-like motion generation, as shown in our earlier publication on ICRA/DETC/RIOBIO conferences (10.1109/icra.2017.7989556, 10.1109/icra.2017.798869110.1115/detc2017-6808210.1109/robio.2017.8324761). We are working towards this concept with some new development (10.1109/LRA.2021.3072859, 0.1109/robosoft48309.2020.9116028, https://ancorasir.com/?p=2969).
We are currently developing a full-sized lobster-inspired robot with reconfigurable modes among four-legged amphibian walking, two-legged standing with two-armed manipulation, and underwater cruising, which should be published or submitted to journals and conferences soon (it takes longer to develop more complex systems).
Another example is in grasping. Soft and bio-inspired designs can provide novel solutions to old problems, as shown in our research on omni-adaptive soft structure (10.1109/robosoft48309.2020.9116026, 10.1109/LRA.2021.3065186, 10.1109/lra.2020.2982059, 10.1109/lra.2020.2969932).
We developed an interesting three-dimensional structure with soft frames to introduce passive adaptation while in contact with the environment in any direction, giving a simple structure a life-like motion that is found quite powerful when grasping challenging objects. Any existing grippers with a rigid design can be attached with our omni-finger to become soft and adaptive in grasping, which is practical benefits with many engineering potentials.
We have patented the design and have a university startup founded working towards the commercialization of the concept. In our research effort, we have added sensing capabilities to the design to become more intelligent during contact. Our recent collaboration with colleagues from Hong Kong is another effort in this direction.
Magnetic soft skins can provide advanced sensing of the touch in object manipulation. We are currently integrating such sensitive touch to underwater object manipulation, which is an exciting new direction that is not well-researched yet. And we are expecting some recent publications soon.

Is soft robotics the next step of the robotic revolution?
From a research standpoint, any new publication could be the next step for the “robotic revolution.” It is a matter of time, development, public recognition, and engineering adoption.
Soft robotics has gone through quite a few stages of growth in history. It is currently on the rise thanks to more capable and in-the-house fabrication. It is more of a collective effort of the community interest. I would be glad to see continuous development in this area, the same as any other area in robotics.
How far are we correct in saying that soft robots like Disney’s Baymax will populate the future than stiffer and metallic Terminator or a Transformer?
5~10 years, at least? Entering the house environment where ordinary humans are more familiar is more challenging than entering the industrial setting, where one is revolving around a human in (almost) any scenario while another is centered on creating a specific environment to solve a particular problem.
I think both Baymax and Terminator are still far from reality but definitely expanded our imaginations on what robots might look like, how they may interact with a human, and to what extent they might influence our lives. But we see some partial development here and there, which shows a promising future that needs further research and development.
What are some of the hurdles and specific applications that you envision in the advancement of wearable robotics?
How to interact with a human? How can they affect our lives? How should we understand robots that are wearable? And how can we live in peace with them once they become part of our bodies and lives? The same as cars, trains, personal computers, the internet, mobile phones, and anything we are currently enjoying. When things wearable on your moving body can actually move on their own, you naturally have questions on how you should live in peace with it.
A potentially good starting point would be something smaller, which seems less critical but could become useful in our life. Smartwatch is a good example, which gives the old “time” a new “look” during the interaction.
Now we look at a smartwatch for further information about how long we walked today, check heartbeat in action, messages, or others. We researched about them in the past (10.1109/tem.2020.3001764, 10.5465/ambpp.2014.13204abstract) from a product design perspective.
What is the goal of your collaboration – soft tactile sensor with skin-comparable characteristics for robots? Which milestones are you aiming for?
The goal is to generate better engineering designs with more intelligent interactions while solving human problems through touch and feel. As mentioned in reply to question 1, one direction I’m aiming for is underwater grasp sensing within an environment is that is more challenging for human subjects. We are in the process of integrating more sensitive sensing with our omni-adaptive finger.
I’m curious to know your thoughts on Musk’s Neuralink chip. Can we become the next Alita?
Too much information to process is my thought on Neuralink. In the end, what we are trying to develop is a better way to interact with the physical world through our human body and mind. For healthy subjects, do we need all that much access to our brain? When everything is digitally interpreted and controlled, what is left with our human body and brain (to do)? For injured or disabled subjects, this could be helpful to restore (to a certain extent) their comfort of life and the joy of living, as long as it is cheap, sustainable, and useful.
The existence of Alita is nicely suited for science fiction, but it’s a world we do not fully understand. Whether we can is the question we can solve through engineering and science, but why we need to do so is another question that is more difficult to answer. Alita is a good solution in the future that seems nice to solve our existing problems now. But what might be the problems in the future when we become Alita? Are we still qualified to be called human?
Someone comes up to you and says, “I wanna be just like you. I want to be a bionics design scientist”. What advice would you give?
Observe, analyze, and take action.
Quick bits:
What is your favourite movie quote?
Why so serious … (not the Joker part, and not necessary the Batman route, just find your joy of life would be good enough, don’t you think?)
If you were a superhero what would your powers be?
Design and build anything that works 🙂
If you could get yourself anything, what would you get?
A better lab with a group of talent researcher to design and build anything.
What will your TED Talk be 10 years from now?
The science of design for a better life.
What books should I read in 2021?
Some history book, or biography, would be good to read in 2021.
Dr. Song, it has been a real pleasure! I can’t thank you enough. Your work is truly an inspiration. We look forward to visit you again and see more of your innovative research. Till then, we wish you all the very best for your future endeavor.


[…] His Bionic Design Lab conducts research in Bionic Design, Robot Learning & Design Science. His vision is to create advanced smart robotic systems. […]