Until recently, most robots were designed to assist humans, right from the kitchen to their office premises we have seen these bots performing multi-tasking. Many fascinated machines have been fabricated keeping the nature in mind and this has led to a new field within robotics called the biomimicry. Every now and then, researchers come up with mind blowing ideas and concepts which creates an awe amongst the masses and this time, researchers at Shanghai Jiao Tong University, Shanghai, China has created the same wave with their ‘baby elephant’.
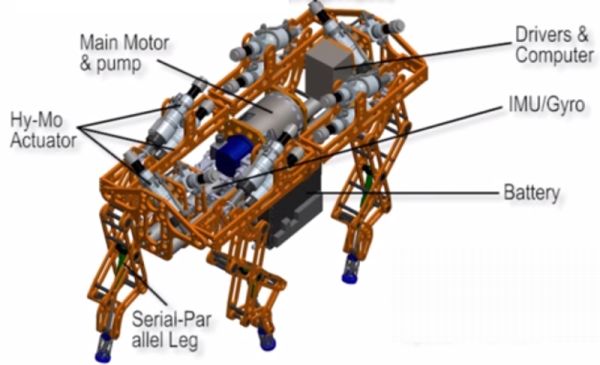
The robot is a quadruped with size 1.2×0.6×1.0m and weight around 130 kgs. It has the capability of bearing load of 100kg and can move with a speed of 1.8km/h. Other parts include main motor & pump, Hy-Mo actuator, drivers & computer, IMU/Gyro and battery.
It is called the baby elephant because of its looks and of its heavy load capability. The jumbo consists of 4 hybrid mechanism legs and a new type of actuator. Till date most of the quadruped bots like JROB-1, BISAM, BigDog, Little Dog, HyQ, Cheetah, were designed using serial mechanism legs which included thigh, knee, crus and ankle as is the biological structure of animals, however, this time the team behind the quadruped has changed the trend.
Serial Parallel Mechanism Legs
Among the other tasks, carrying heavy load is also one of the most important tasks for the mentioned quadruped robots hence the knee actuator is required to be lightweight, powerful and easy to maintain across the terrains. However, it is expensive and difficult to meet the requirements hence, the team at Shanghai Jiao Tong University has utilized a serial parallel mechanism to design the leg. This gives a symmetrical structure with three degrees of freedom driven by three hydraulic cylinders that are placed on the hip region.
By optimal design of dimensional parameters, its workspace is designed to be sufficient for walking and running.

For reducing impact and conserving energy, springs are attached to the leg. In order to calculate ground force and ZMP, encoded pressure sensor and displacement sensor are added. Lower region of the leg is free from any actuator or sensor. This creates lower inertia, hence easier to control device on marshy terrains with a higher payload.
Hip actuators on either side of the body support the frame together and thus increasing the capacity of carrying heavier load.
Hy-Mo Actuator
The team has developed an innovative hydraulic actuator called the HY-Mo. It makes use of servomotor for controlling the valve of the hydraulic cylinder. The hydraulic system does not need servo valve, cooler, filter and accumulator so it has good dissipation of heat and low leakage.
Control
Two control schemes are exercised for maneuvering the quadruped. ZMP based planning algo is employed for static walking gait, while for trotting pace like generating foot trajectory, a pattern based planning method is utilized.
More on the saddle in the following video:
As far as I know, this happens to be the first robot fabricated especially for riding. Imagine a setting where people are talking to each other while riding on their respective baby elephant and discussing matters of day-to-day importance, a time when owning this quadruped won’t be a big deal, the scenario sounds funny and interesting at the same time 😉
Journal Reference:
Feng Gao
Chenkun Qi
Qiao Sun
Xianbao Chen and
Xinghua Tian
A quadruped robot with parallel mechanism legs.
Hong Kong Convention and Exhibition Center, May 31 – June 7, 2014. Hong Kong, China


