Inspired by a small rodent, gerbil, researchers at the University of Pennsylvania have unleashed robot Jerboa. This dynamic bot has no legs but actuated hips and a tail through which movement is achieved.Spring attached in its hips is compressed by actuating the tail that is near to anti-damping motion. The motion of the tail causes the bot to jump, which means, the tail is providing acceleration to the legs. This is the first robot of its kind, where a tail is used for driving the legs.
Behavioral programming
Researchers envision the platform of jerboa robot could be utilized for exploring various modes of quasistatic and dynamic balance facilitating different kinds of locomotion like sitting, standing, jumping, walking, hopping, jogging, running, turning, rotating and leaping.
Accomplishing this array of behavior with a single under-actuated body, calls for wide variety of controllers. Hence, the team is looking forward towards compositional techniques that involve collaborating and re-using of some modules to achieve maximum number of combinations from the available choices.
In simple words, jerboa robot might be seen as another acrobatic machine that is capable of displaying wide variety of balance and motions. Something which the researchers from the same university did with RHex, the parkour robot.
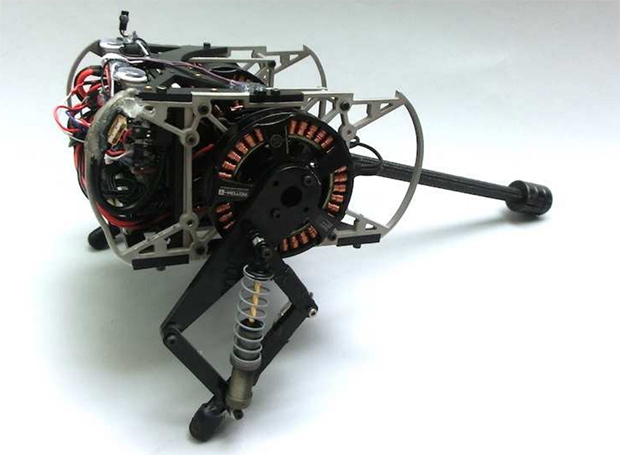
Source: UPenn Kodlab


