Researchers at the University of California San Diego have come up with an innovative approach in creating soft bot that is devoid of any electronics. Rather it is an air powered robot. All its controls and locomotion are done with the help of pressurized air.
According to Dr. Dylan Drotman, the paper’s first author, their work is a representation of fundamentals of robotics that is not only autonomous but also free of any electronic circuits.
Engineers envison their product will find space in:
- low cost entertainment like toys
- home robotics
- arenas where electronic can not function like MRI (Magnetic Resonance Imaging) machines and
- mine shafts.
Since, these bots can adapt to their surroundings and do not interfere with external settings hence, they are almost safe to operate near humans.
Low-cost integrated pneumatic circuits
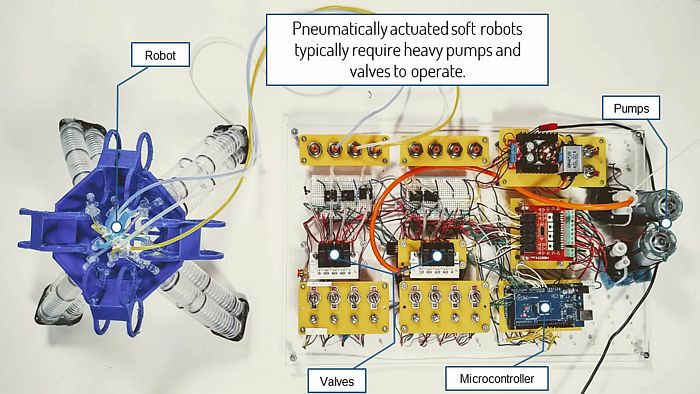
Most of the soft machines are operated by compressing air however they are controlled by electronic circuits. These circuits are generally outside the robo body and are often bulky, expensive and has a particular rate at which they charge (if it’s a battery operated).
By contrast, the UC San Diego robot is not heavy, rather it is made up of low-cost pneumatic circuits. And these circuits are integrated with the required tubes and soft valves. All the controls are within the machine itself, nothing is outside. The bot can move and maneuver in response to signals it senses from the environment.
Tolley, the study’s senior author further added that their aim was to build simple air-powered nervous system that can walk. Working on the same paradigm, complex robotic brains too can be made.
Inspired by sideneck turtles
The robot’s computational power is quite similar to mammalian reflexes that are operated by neural response from the spine rather than the brain. The team is inspired by the biological walking sequence of sideneck turtles. They tired to mimic the biomechanics of its diagonal gait.
The valves are arranged in a manner of an oscillator circuit. And accordingly, regulate the order in which pressurized air moves in the air-powered muscles in the robot’s four limbs.
To create a balance and co-ordination between the four limbs of the bot, researchers devised a component that delay injection of air into the legs.
Simple mechanical sensors, the little soft bubbles filled with fluid, are placed at the end of the robot’s boom. When the bubbles are depressed because of the force, the fluid flips a valve in the machine that’ll enable it to reverse direction.
How it works
Entire system is inspired by neural circuits found in nature that generate rhythemic patterns.
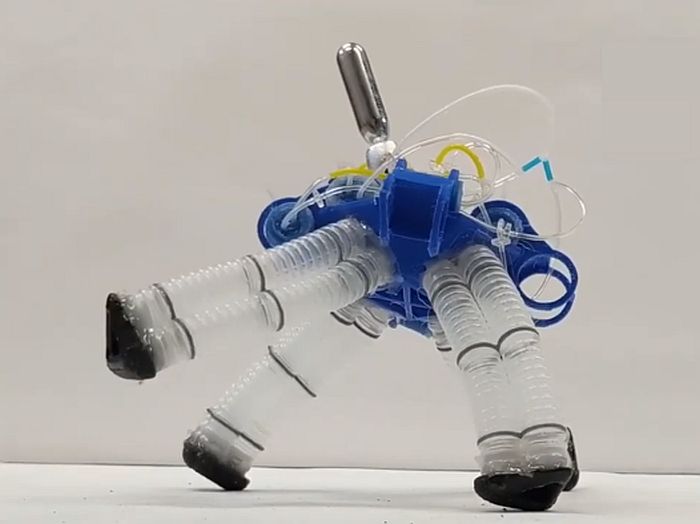
While movement is driven by series of valves that led pressurise air in and out in specific sequences. Each of the four leg has three degrees of freedom operated by three individual muscles. A custom valve allow robot to change directions.
The limbs are positioned downward at 45 degrees. Each leg is embedded with three parallel pneumatic cylindrical chambers that are attached to one another and are integrated with bellows.
When pressure is raised inside a chamber, the limb bends in the opposite direction.
The three chambers of each limb give the freedom of multi-axis bending that is required for walking. As mentioned before, the walking gait is inspired from sideneck trutles, so the researchers have paired chambers from legs that are diagonal to one another.
A soft vlave is embedded to rotate the direction – between counterclockwise and clockwise – of the limbs. This mechanism is a somewhat like taking two nerves and swapping their connections in the brain.
Researchers envison to improve the diagonal gait of the robot so that it can easily maneveur on uneven terrains and cross over variety of obstacles as well. And this would require more advanced network of sensors coupled with complex pneumatic system.

Takeaway
Pneumatically actuated soft robots have shown promising results in adapting to the external settings.
Another interesting part is its embedded control and actuation systems that require only constant pressurized air than connection to any electric circuit board. This makes it safer to operate around humans.
The work is very much similar to what NASA’s AREE intended to do, that is, explore Venus. It is designing a sensor that does not rely on electronic systems. After all, Venus is an extreme world, with 840 degrees Fahrenheit and a surface pressure 90 times that of Earth.
Via: UC San Diego


