Getting work done through robots is no more a challenging task, with the continuous progression in technology, more and more machines are being designed keeping in mind the safety factor which still reigns supreme when interacting with a machine. Yet we are too far from two equally important aspects, which if conquered, might thoroughly revolutionize robotics, and they are – consciousness and self-awareness.
In an attempt to reach fluency in human-robot interactions, researchers at the Johns Hopkins’ Computational and Interactive Robotics Laboratory have come up with a simulated setting, which they call as an Immersive Virtual Robotics Environment (IVRE). Their aim is to develop an interactive atmosphere where users can give instructions, act as a team and/or cooperate with a robotic system. This could be made possible either in simulation or in real time by means of a virtual proxy.
This implies that one can take the feel of being with a robot in doing some collaborative task but in virtual reality. This technology would assist humans in venturing into the scary environments where otherwise would be a risky business to operate.
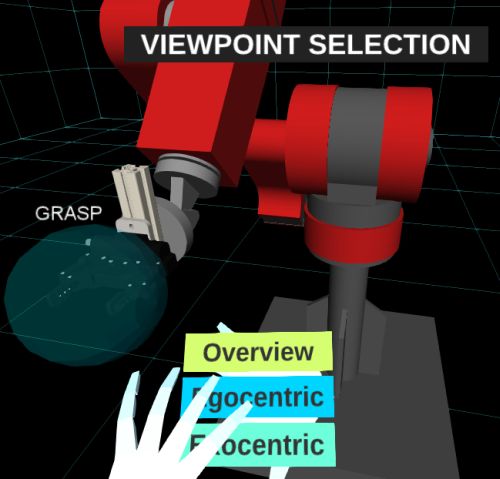
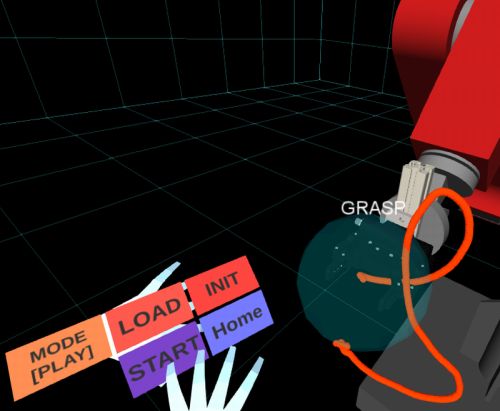
IVRE takes simulation to the next level by combining another add-on called the augmented reality. It empowers users with information regarding the machine, the surroundings and understanding the work process of the bot. For instance, a user can effortlessly teach a robot to open a door, turn the knob or manipulate it in terms of operating a virtual tool, by becoming a part of it via simulation.
The environment will help taming the machines without getting into the actual physical contact. This would totally act as a game changer in the field of robotics, especially for DARPA Robotics Challenge, where people without the prior knowledge or skill set involving robotics training would be able to ‘hang out’ with the bots.
The virtual user interfaces will provide the most fluent human-robot interactions but with discrete ways.


