Technological advancement has opened-up exciting possibilities for research in space and celestial bodies beyond the Earth’s atmosphere. The use of robots in space exploration has greatly increased our understanding of other planets, especially Mars, and its possibility for supporting life.
The exploration of Mars and its surface for extra-terrestrial life has always been a fascinating undertaking for astronomers. Additionally, the discovery of resources on Mars, such as water and minerals, could be an asset in future human missions.
Thus, exploring the red planet has both scientific and practical implications that makes it an important goal for space exploration. Therefore, to explore the planet’s surface, researchers at Nanjing University of Aeronautics and Astronautics have come up with a lizard inspired four-legged robot.
Lizard inspired four-legged robot
To mimic desert lizard’s gait, they have provided a flexible body structure to the bot.
As per the team, surface of Mars consists of granular soils and different types & sizes of rocks, which could make the topography difficult for rovers to manoeuvre. For such an arena a four-legged robot – which can mimic the locomotion style of the desert lizard – could be an ideal candidate. The quadruped can easily walk through soft soils and climb over rocks.
Quadruped with flexible spine
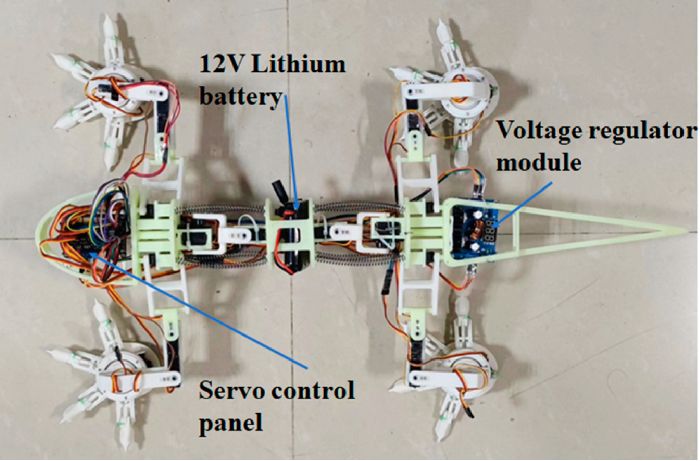
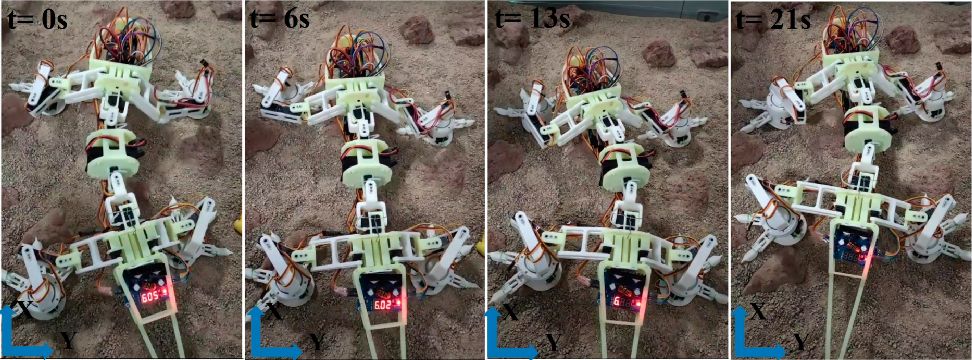
The biomimetic robot created by Chen and his team consists of a flexible spine-like structure and four legs. The “creeping” motion is achieved by having two hinges and a gear mechanism in each leg that creates a swinging movement, allowing the robot to move forward in a similar manner to a lizard’s gait.
This design is used to replicate the agility and dexterity of a lizard’s movement, which is useful for tasks that require stability, balance, and manoeuvrability.
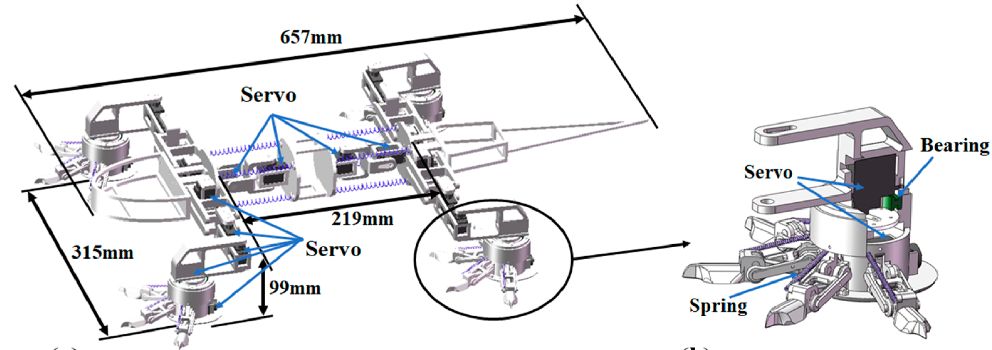
The quadruped robot’s spine structure is connected to its legs through hip joints made up of two servos and a four-linkage mechanism. This design allows the robot to lift its legs and move without losing balance.
Two servos in the hip joint – The use of two servos in the hip joint and a four-linkage mechanism provides the robot with a greater range of motion and stability, enabling it to perform various tasks in a more efficient and effective manner.
Four flexible toes – The robot’s feet are equipped with four flexible toes, each consisting of two hinges and a claw. The hinges and claws allow the robot to grip and maintain balance on various surfaces, providing it with improved stability and traction.
Legs with four-linkage mechanism – The quadruped robot’s leg structure is designed with a four-linkage mechanism that ensures steady lifting motion. This mechanism provides the robot with stability and control, allowing it to perform tasks that require precise movement.
An active ankle – The foot of the robot is equipped with an active ankle and a round pad with four flexible toes. The toes are designed to effectively grip and hold onto soils and rocks, providing the robot with improved traction and stability while in soils and rocks.
Simulation-based performance
The researchers behind the quadruped robot evaluated its performance through simulations to determine if it could effectively replicate the movements and walking style of lizards.
The results were positive. Thus, validating the design and proper functioning of the machine. Based on the findings, researchers envision that the bot can effectively move in rocky environments. And it has huge potential for future missions on the red planet.
Takeaway
Chen and his team are working towards optimizing and improving its design. In addition, they are also working on machine learning models that would enable the bot to adapt its movements to different terrains. Feeding the robot with continuous power supply is another major task that the team is looking forward to solve.
By adapting the best features of nature into robotic design, researchers are creating robots with improved functionality, efficiency, and resilience.
Lizard-inspired robot is just one examples of biomimicry that is helping engineers and scientists to draw inspiration from nature’s solutions to various problems, such as movement, sensing, and adaptation to different environments. The inspiration of lizard-inspired robot is a promising development in the field of robotics and surely it has the potential to play a significant role in the future of robotics.
More information: Guangming Chen et al, Development of a Lizard-Inspired Robot for Mars Surface Exploration, Biomimetics (2023). DOI: 10.3390/biomimetics8010044


