
MIT engineers have built a robot that can seriously play ping pong, and not just bat the ball back. This bot can understand the spin, predicts where the ball is going, and interestingly puts its own spin on returns.
The whole project is from MIT’s Biomimetic Robotics Lab. It surely must be fun to build such robots, but embedding dexterousness through table tennis is a smart move as it pushes the robot to deal with speed, spin, unpredictability, and quick decision-making, all at once.
First, It Has to See the Ball, Fast and Accurately
Before the robot can make a move, it needs to figure out where the ball is, where it’s going, and when it’ll arrive. That’s where the perception system steps in to help out.
They use six OptiTrack Flex 13 motion capture cameras to follow special ping pong balls wrapped in reflective tape. The tape helps the cameras track the balls more easily, even if it slightly affects their flight. But overall, it’s a small trade-off for the great accuracy they get!
The tracking system works at 120 frames per second and can locate the ball’s position with incredible precision, that is, within just a millimeter. It predicts where and when the ball will land by fitting a smooth 3rd-order polynomial to the data, making its forecasts much more accurate than simple frame-to-frame speed measurements. Plus, it smooths out the predictions with a moving average, so the robot arm moves gracefully without jerking around due to noisy data.
By the time the robot starts swinging, its prediction of the ball’s position is usually accurate to within half the width of the paddle.
Agile Arm, Sharp Shots
Once the ball’s trajectory is locked in, the robot’s arm takes over.
So, the arm is essentially a sleek, lighter take on an MIT-designed humanoid arm. It boasts five degrees of freedom, meaning it can move and rotate the paddle in a bunch of different ways.
It’s fast too. The actuators deliver high torque, low inertia, and quick response times. The robot’s paddle can accelerate at up to 300 m/s² that’s fast enough to return some serious shots. The fifth joint, which controls the paddle’s orientation, is powered by a tiny 82g motor, but it’s essential for getting the perfect angle and spin.
The robot can control where the paddle goes (position), how fast it’s moving (velocity), and how it’s angled (orientation), all at once.
How It Plans Each Shot
There are no predefined moves that the bot is performing, rather it’s constantly adjusting its plan as new ball data comes in.
The whole movement is framed as an optimal control problem. The goal is to move the arm to the perfect position, with just the right speed and angle, all while keeping acceleration to a minimum. Basically, it’s about being both precise and smooth.
The team has used a model predictive controller (MPC), which re-plans the movement in real time as the ball’s predicted path updates. It’s like a GPS that keeps recalculating the route while driving.
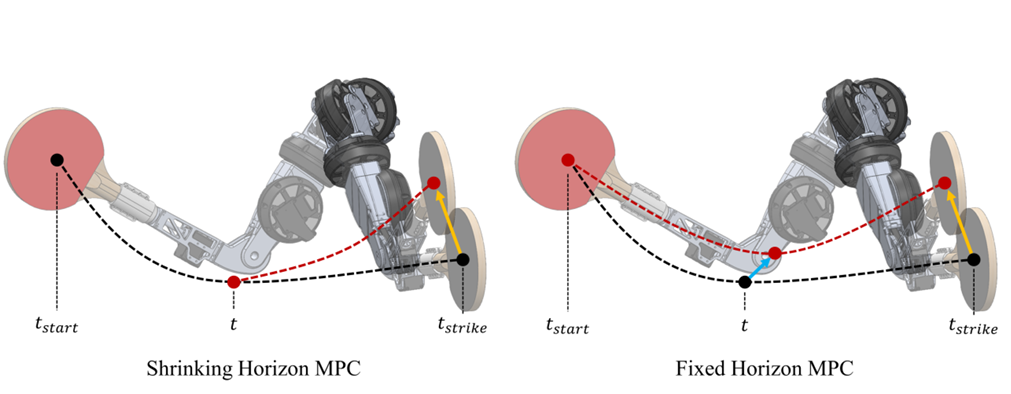
They gave two types of MPC a shot, shrinking horizon and fixed horizon, and ended up going with fixed horizon since it’s faster and more dependable. It solves the problem in just around 3 milliseconds, so there’s plenty of time to respond and take action.
One issue with fixed horizon is that it can sometimes make jumpy changes to the plan, but they smooth this out by averaging ball predictions and easing between trajectory updates over 20 milliseconds.
The entire system operates across three interconnected computers via Ethernet, with the total reaction time, from ball tracking to dispatching a new movement plan to the hardware, ranging between 7.5 and 16 milliseconds.
Robot Nails Speed and Spin Across Styles
The researchers ran tests using three types of shots: loop (topspin), chop (backspin), and drive (flat). For each type, they sent 150 balls toward the robot. The swing lasted half a second, with a target paddle speed of 6 m/s.
The robot hit 88% of the shots overall. It was slightly better at chops (89.2%) and loops (88.4%) than drives (87.5%). After hitting, the ball left the paddle at an average of 11 m/s.
When they pushed the paddle speed up to 10 m/s, the ball came off as fast as 14 m/s.
They also evaluated the proximity of the robot to its intended strike conditions, specifically assessing whether the paddle was correctly positioned, moving at the appropriate speed, and oriented in the correct manner. In most cases, the performance met expectations.
The team envisioned that overall flexibility could be substantially enhanced through the incorporation of an additional wrist joint. Although the fixed horizon controller maintains computational efficiency, it may result in abrupt transitions in target motion. Some degree of smoothing has already been implemented; however, further refinement remains possible. The inclusion of this extra joint would afford the robot improved regulation of horizontal angles and increase the adaptability of its movements, particularly when executing more complex or challenging maneuvers.
Takeaway
It is really interesting to see how dexterous the robot is, and equally fascinating is its manner in which it accomplishes this task. It integrates rapid visual processing, sophisticated planning, and responsive hardware in a manner that closely approximates human gameplay.
One of the most intriguing aspects of this research could be tasks such as assisting in surgical procedures, manipulating delicate instruments, or collaborating directly with individuals in unpredictable environments, all of which necessitate rapid and adaptable control mechanisms.
Could this be the next step toward bringing robots into roles that require both skill and sensitivity?


