Animals have always inspired our scientists, whether it is in the field of medicine or robotics. Robots based on animal movement are not a new concept because animals perform activities more efficiently and proficiently, that are not yet achievable in our robots. In another animal inspired, jellyfish robot, researchers studied different animals from small creatures like moth to the largest like humpback whales, to understand how animals moved through water or air, with minimal transport cost. They discovered that the secret about their movement lies in the way these animals bend their body parts.
The jellyfish propulsion method is considered to be one of the most energy efficient on this planet, requiring the lowest energy expenditure. Where as humans are still struggling to make machines that are energy efficient as these creatures, but on the contrary requires far more energy to attain similar movement. This has also inspired U.S. Navy to create robots based on jellyfish movement and this calls for in depth research to be done on the jellyfish.
The jellyfish expert and a biologist, John Costello, also a scientist at the Woods Hole Marine Biological Laboratory and currently working with the Navy team, says that when you try to make such bio inspired robot you realize how little you actually know these organisms in terms of how they achieve such proficiency. He and a professor at Roger Williams University, along with a team of undergraduate students, studied videos of 59 varying animals to understand the mechanism behind their steady movement through their natural environment.
They noticed that these animals while moving either through air or water used propulsion mechanism that bend in a similar way at the edge of the tip similar to the curve at the whale’s tail edge or wing shape of a bird. And more importantly the degree at which these fins, tail or wings bend were strikingly uniform across various species which is just perfect to attain flexibility.
Costello further said that the some of the earlier robots based on animal movement were inflexible and therefore were rigid while moving and required a lot of energy. So to counter this problem, a team of scientists at Virginia Tech, added a more flexible silicon cover along the bell of jellyfish to achieve flexibility as similar to jellyfish. When tested in water, it moved like never before, way much faster and without requiring any additional energy supply. And therefore it is rightly said that if you like to make a machine with high efficiency, animal based models are perfect. We can conserve a lot of energy, if at all we can achieve proficiency with what these animals functions.
Such studies in the future will help scientists to design robots or vehicles that are more energy efficient while moving through the water as similar to their living inspiration. No doubts, there is still a long way to go in explaining how animals achieve such high efficiency in their movement.
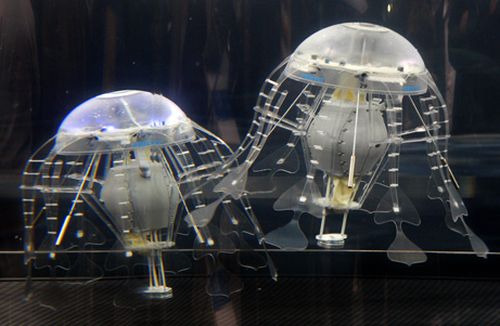
Image: news.nationalgeographic.com


