
When it comes to cancer-related fatalities, lung cancer tops the list. One of the main reasons could be the presence of tiny tumors in deep within the lung tissue. This poses a major challenge for surgical accessibility.
To address this challenge, researchers at UNC Chapel Hill and Vanderbilt University have been trying to fabricate an exceptionally flexible yet durable robot. The device will have the capability of maneuvering through the intricate terrain of the lungs.
Self-guided Needle Robot
Ron Alterovitz, PhD, in the UNC Department of Computer Science, and Jason Akulian, MD MPH, in the UNC Department of Medicine, have demonstrated that their device can autonomously navigate through a living laboratory model. Very deftly, the robot can move within the environment avoiding delicate structures like airways and blood vessels.
The technology provides precise access to small targets, down to millimeter accuracy. Thus, it surpasses the capabilities of standard and even robotic bronchoscopes, added Dr. Akulian.
Therefore, the development is a significant boost for pursuing intricate lung targets.
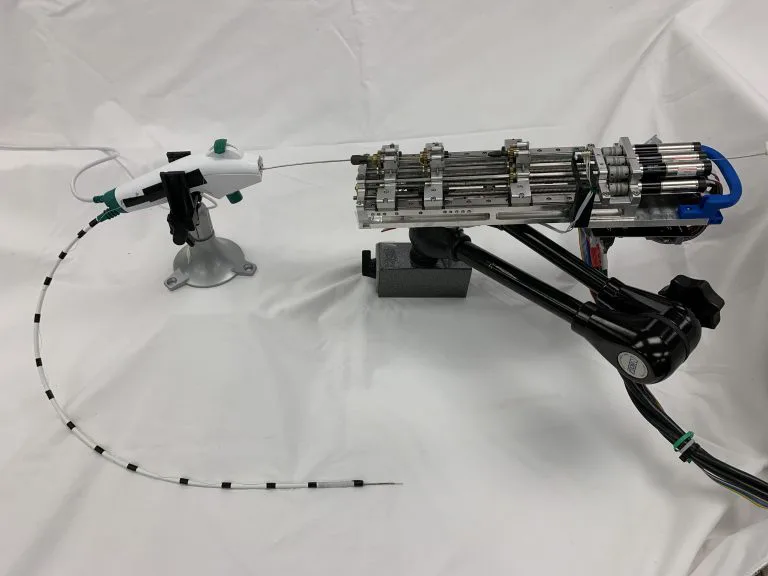
Key Components of the Precision Robotic Needle
The robot is made up of many distinct elements. There is a mechanical system responsible for regulating the needle’s forward and backward movement.
Whereas the structural design of the needle allows it to navigate through curved routes with precision.
Crafted from a nickel-titanium alloy, the needle has undergone laser etching to enhance its flexibility. This will enable it to move smoothly through biological tissue.
Enhanced Needle Navigation
With each forward movement, the needle’s etched surface boosts it to manoeuvre around obstacles.
While, supplementary adjuncts, like catheters, can be utilized alongside the needle to conduct medical operations such as lung biopsies.
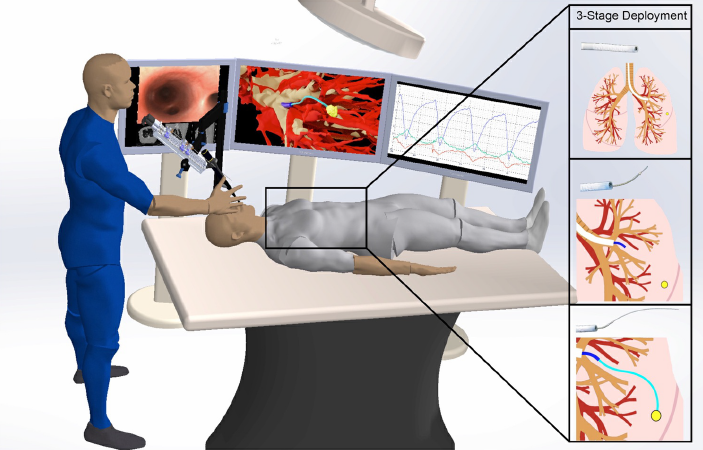
Navigating the Needle in 3D Lung Model
For effective tissue travel, the needle necessitates precise guidance.
With the help of CT scans of the thoracic cavity, the researchers made use of artificial intelligence to generate comprehensive three-dimensional lung model. The resultant prototype included the airways, blood vessels, and the designated target.
Leveraging this 3-D model, the needle is positioned for targeted launch. Followed by its autonomous journey from “Point A” to “Point B”. All the movements are directed by the AI-powered software. Everything is smoothly done without touching the critical anatomical structures.
Takeaway
The tech is indeed a significant advancement in the development of robotic systems for applications in healthcare. It will surely lead to improved precision and safety during surgeries and medical interventions.
It could also pave the way for remote medical procedures, where robots can be controlled by skilled healthcare professionals from a distance. Thus, providing care to patients in challenging or inaccessible locations.


