
In a collaborative research co-led by City University of Hong Kong scientists have created an innovative tactile sensor that resembles the characteristics of human skin.
Mounted at the fingertip, the sensor is capable of holding delicate objects and thread a needle.
Soft artificial tactile sensors
Human skin is able to hold objects due to its ability to sense. It calculates the amount of pressure it has to exert to hold, slip or slide (objects) each other.
Effortlessly, our skin is able to compute magnitude, direction and the amount of force applied to grasp an object. The force in our hands and fingers has to be subtle enough to hold the object stably and without hurting oneself.
Inspired from this feature, research have fabricated a soft tactile sensor. Structurally, the sensor is framed into multi-layered assembly. The top layer, incorporates an elastic and specifically magnetised film of nearly 0.5mm thin.
Self-decoupling and super-resolution abilities
As soon as the layer gets under the influence of external pressure, the film gets deformed and eventually there happens to be a change in the magnetic field.
Interestingly, the layer can decouple that is, split the external force into two sub-parts:
- Normal force that acts perpendicular to the object and
- Shear strain, force that acts parallel to the surface of the object
As per researchers, the effect of decoupling is important because individual force has its own discrete influence on the object. And it is very important to know the precise value of each force component.
Once it is known, it becomes easy to track or control the stationary state as well as the trajectory of the object.
Localization accuracy for contact position
Sensor’s super-resolution feature enables it to analyse the stimuli’s position with the nearest precision value.
Deep learning algorithms are performed to compute the super-resolution feature. It enhanced the overall efficacy of soft artificial tactile sensors with the least number of sensing units. This also means that there will be
- less number of wirings and
- reduced time gap for signal transmitting
Researchers added that this happens to be the first tactile sensor that has successfully achieved both self-decoupling and super-resolution capacities at the same time.
Sensor performed challenging tasks
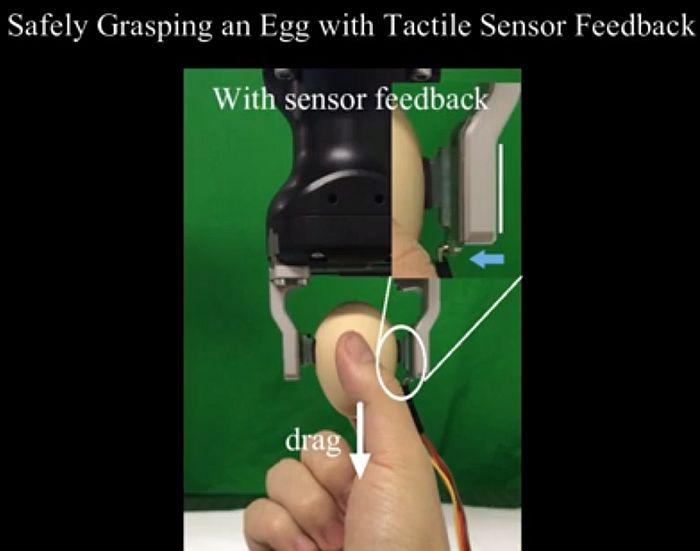
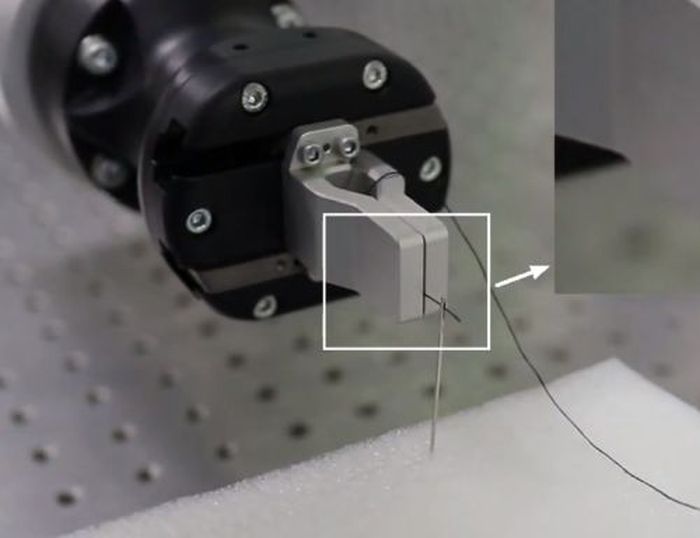
Sensor when effectively positioned on the fingertip of a robotic gripper was tested performing challenging tasks like grasping egg and threading a needle.
To take it to the next level, external force was applied to drag the egg away. However, with super-resolution ability, the sensor was able to adjust the contact position. Also, it was able to successfully balance the applied additional force to hold the egg (under external force).
Tactile sensor behaves like human skin
Researchers envision the extension of tactile sensor design into areas like:
- sensor arrays
- electronic skin for covering the entire external robotic frame
- smart prosthetics
- human-robot interaction
Biomimicry or to mimic human skin to one hundred percent, researchers added that the sensitivity and measurement range of the sensor can be regulated by altering the magnetisation direction of the top magnetic layer. Thus, the thickness of the sensor remains the same. Quite like human skin behaves across different parts of the body.
Takeaway
Smart prosthetics and human-robot interaction are the first two things that come to our mind with this revolutionary soft artificial tactile sensor.
Additionally, it will take a huge step towards syncing the synergies between human and home robots.
Many applications in the robotics field like adaptive grasping, dextrous manipulation and texture recognition will take a huge leap with this new tech.


