Biomimicry is the practice of imitating biological systems and processes. So far, it has been a valuable approach in robotics.
By copying animals’ designs, engineers have tried to replicate billions of years of evolution. It has resulted in highly efficient and adaptable designs that nature has already passed on to. For instance, energy-efficient walking patterns inspired by animal gaits or bio inspired vision systems or lizard inspired four-legged robot.
Walking on the similar lines, researchers at the Brain-Inspired Robotics (BRAIR) Lab have developed a plant-inspired controller for robotic arms.
The concept reflects the diverse sources of inspiration researchers draw from to enhance robotic capabilities.
Soft robot arms
Enrico Donato, one of the researchers said that soft robot arms, inspired by the manipulation abilities of “boneless” organisms like octopus tentacles, elephant trunks, and even plants, represent a new generation of robotic manipulators.
These soft robot arms utilize the principles observed in nature to create systems composed of lightweight and flexible materials.
This enables the arms to undergo elastic deformation, resulting in compliant and dexterous motion.
Soft robot arms for navigating unstructured settings
Researchers envision that the inherent flexibility of soft robot arms makes them particularly well-suited for tasks that are otherwise quite challenging or inaccessible for rigid robots.
Basically, the soft robot arms will provide advantages in navigating complex and unstructured environments.
Controllers inspired by the behavior of plants
Conventional controllers for soft robot arms rely on computational formulations to establish a mapping between:
- the task-space (desired movements or goals) and
- the actuator-space (control inputs).
Also, their effectiveness is often dependent on vision feedback.
Therefore, Donato and the team proposed for controllers that is inspired by the movements and behavior of plants.
Decentralized computing mechanisms
Plants have remarkable capabilities when it comes to movement. Their movement strategies are decentralized and do not originate from a central control mechanism unlike animals.
Plants exhibit sophisticated decentralized computing mechanisms which enables them to navigate and respond to environmental stimuli.
Decentralized computing in plants refers to the ability of individual plant cells or tissues to process information and respond autonomously based on local cues.
This allows plants to make decisions and adjust their growth and movement patterns in response to various factors such as light, gravity, touch, or chemical signals.
By leveraging the principles of decentralized computing mechanisms (in plants) researchers designed control algorithms that allowed robots to exhibit adaptive as well as robust behaviours.
Like plants exhibit movement strategies in complex and changing environments, the bots too are aimed to maneuver accordingly.
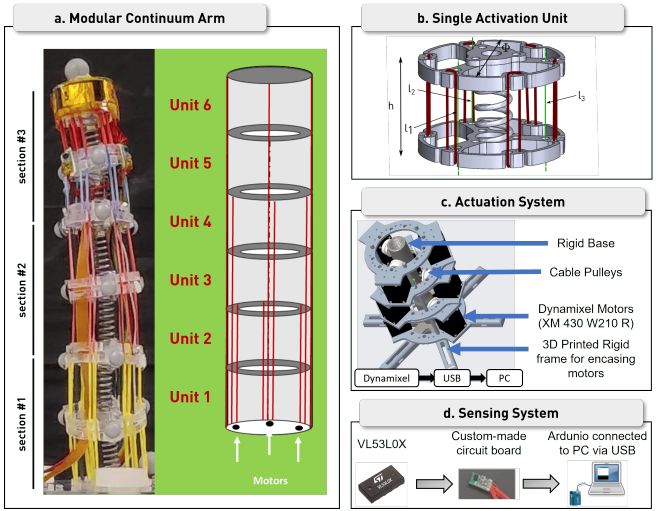
Actuators saturated soft robot arm
The soft robot arm consists of a redundant arrangement of soft modules. Each module is actuated by a triad of radially arranged actuators. This configuration allows the soft robot arm to generate six principal bending directions.
A redundant arrangement refers to having more actuated degrees of freedom (DOFs) than necessary to accomplish a specific task.
More modules or actuators is directly proportional to flexibility and versatility in motion capabilities.
The bio-inspired controller
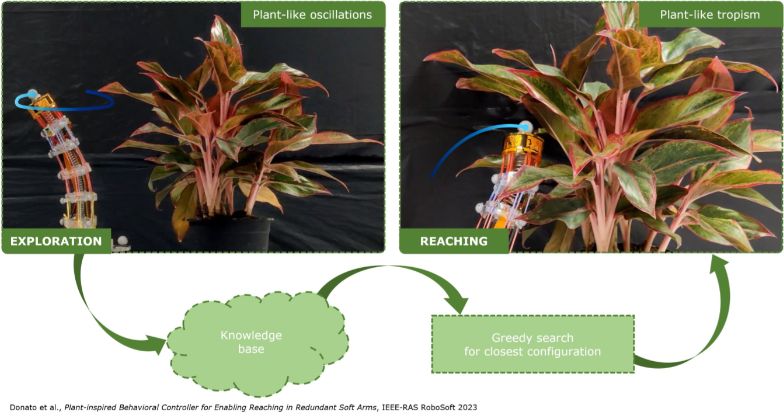
The soft robot arm leverages computing agents that utilize the amplitude and timing of the actuator configuration to replicate the following two types of plant movements:
- circumnutation
- phototropism
Circumnutation refers to the characteristic oscillatory movements observed in plants. It involves a cyclic pattern of bending and reorienting that often occurs in growing plant parts, such as stems, tendrils, or twining vines.
By reproducing circumnutation-like movements, the soft robot arm can exhibit similar oscillatory motions, which could be advantageous for tasks requiring exploration or interaction with the environment.
While, phototropism is a directional movement response exhibited by plants, where their branches or leaves orient themselves towards a light source.
This movement allows plants to optimize light absorption for photosynthesis.
By mimicking phototropism, the soft robot arm can exhibit directed movements. That is, aligning its modules or end effector towards a light source or any other desired target.
Performance of the controller
The researchers conducted a series of tests using a modular cable-driven soft robotic arm with 9 degrees of freedom (9-DoF).
The test (in lab) demonstrated that the controller outperformed previous control strategies proposed in the past.
The controller’s effectiveness was evaluated based on two key aspects:
- the arm’s ability to explore its surroundings and
- its capability to reach a target location.
Results prove that controller has the potential to enhance the capabilities of soft robotic arms in real-world applications.
Takeaway
By exploring the movement strategies of plants and their decentralized computing mechanisms, researchers have put forward the fresh perspective on nature-inspired robotics.
It has also opened new avenues for designing more adaptable and efficient robotic systems.
After all, creative people and problem solvers have always gained an edge when they have looked up to nature for inspiration.
Via: Techxplore


